青山 忠義
ホーム
研究内容
AIP加速課題
研究業績
連絡先
Language
Japanese Page
English Page
マクロ・マイクロ・インタラクション
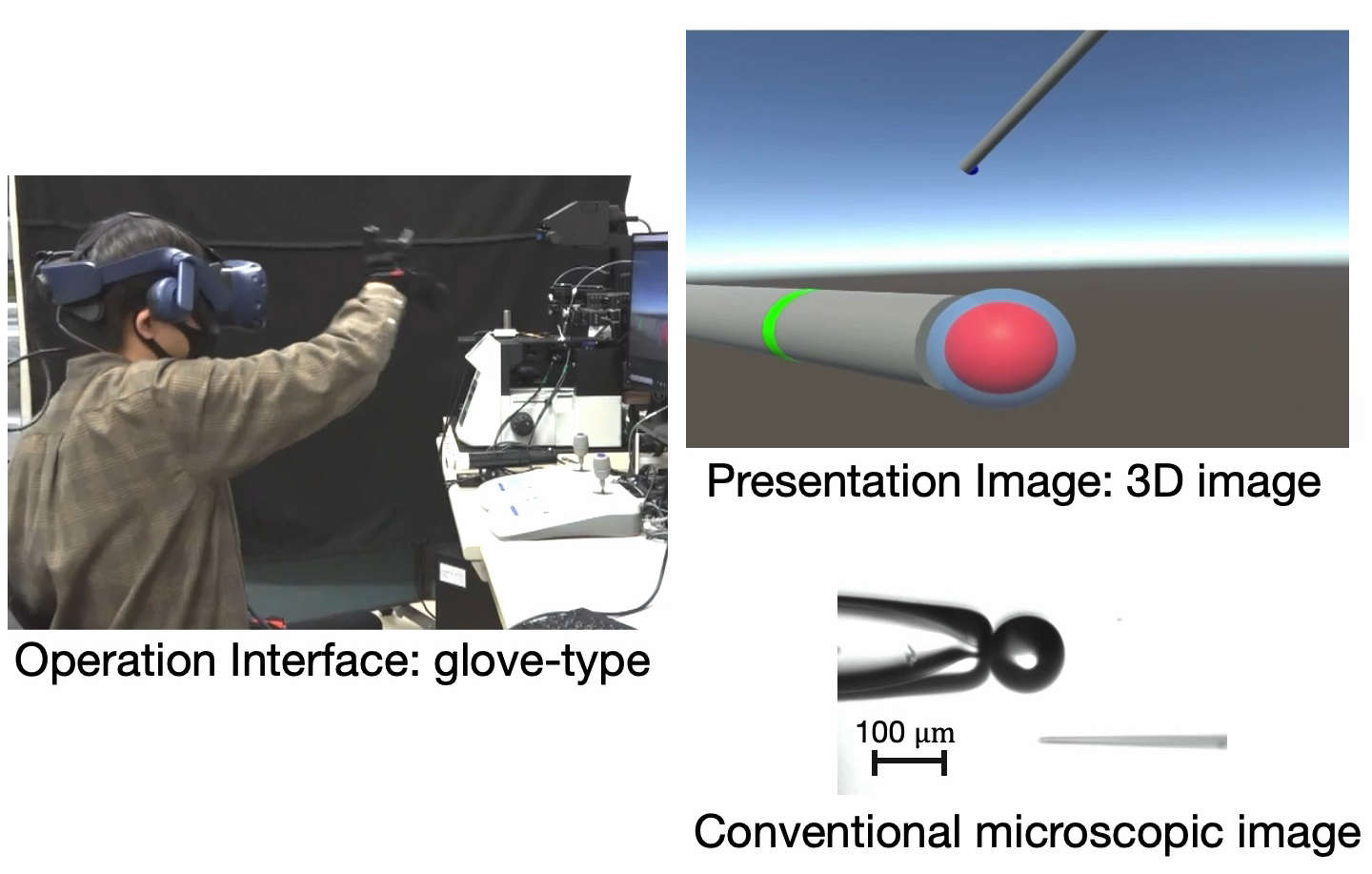
没入型微細操作システム
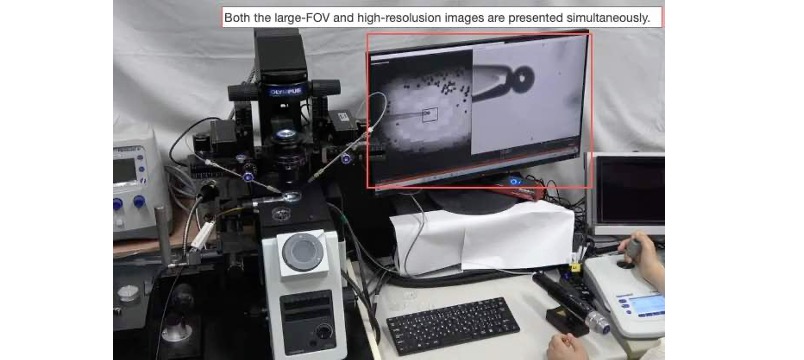
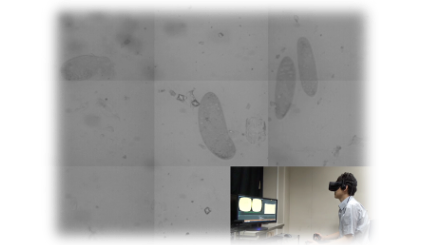
広範囲画像と高解像度画像を同時に実時間提示する微細操作システム
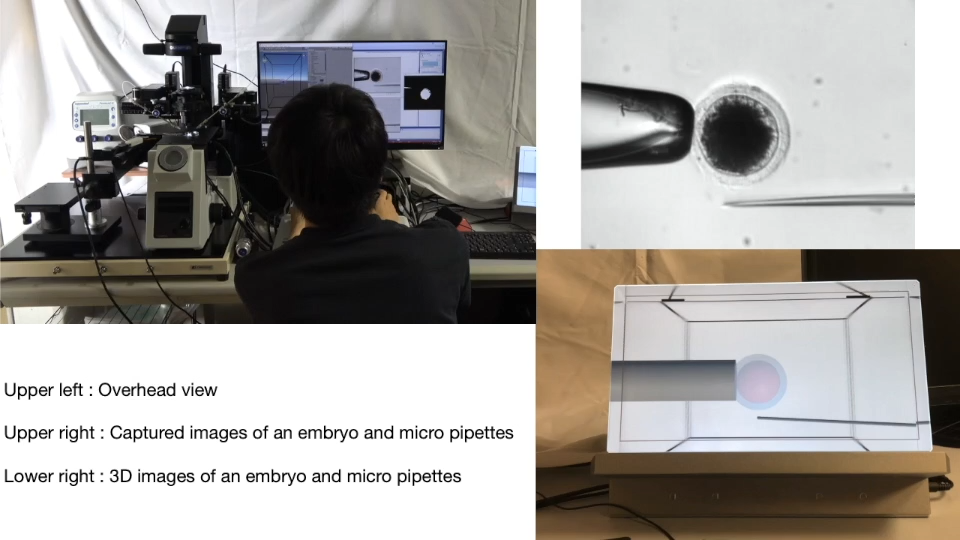
微細操作の実時間3次元画像呈示システム
微細操作のための画像提示インタフェース
画像計測とマイクロ・ナノメカトロニクス
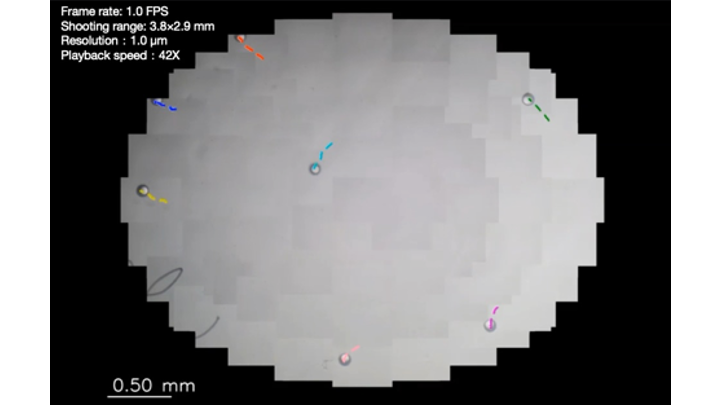
視野拡張顕微鏡を用いた自己駆動液滴の自律運動解析
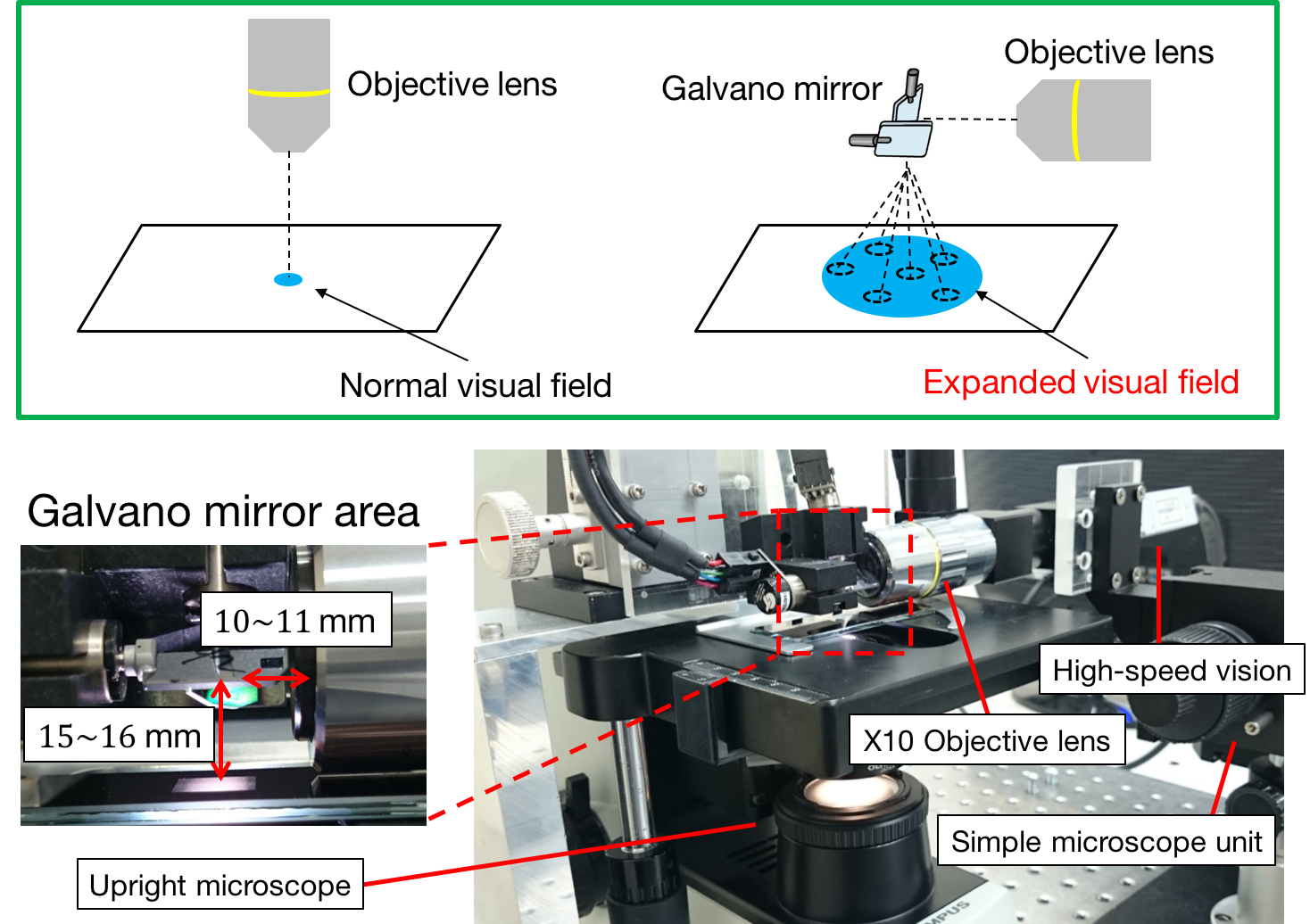
視野拡張トラッキング顕微鏡
視野拡張型顕微鏡システム
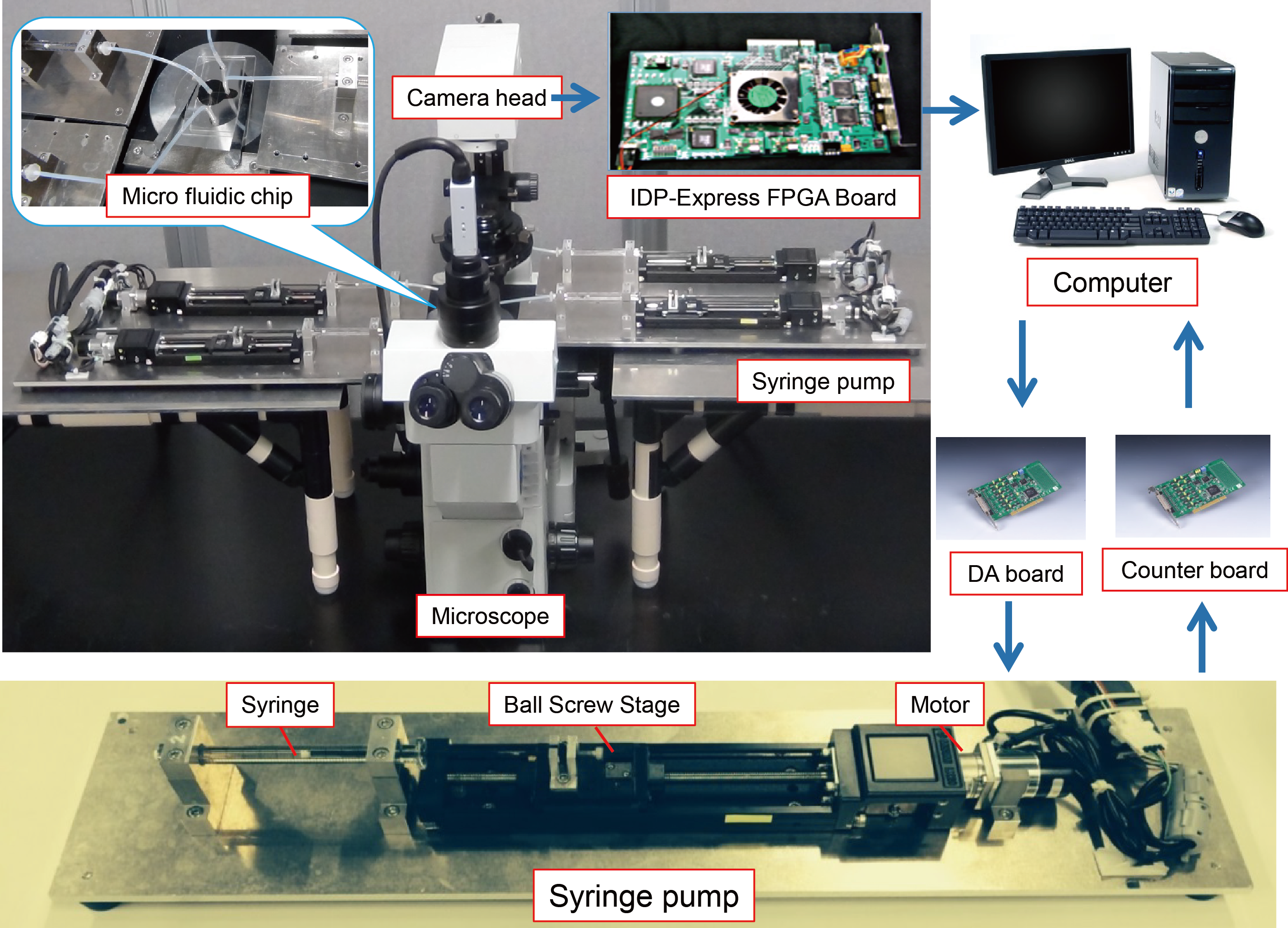
細胞解析に向けた実時間流量制御システム
センサベースドマニピュレーション
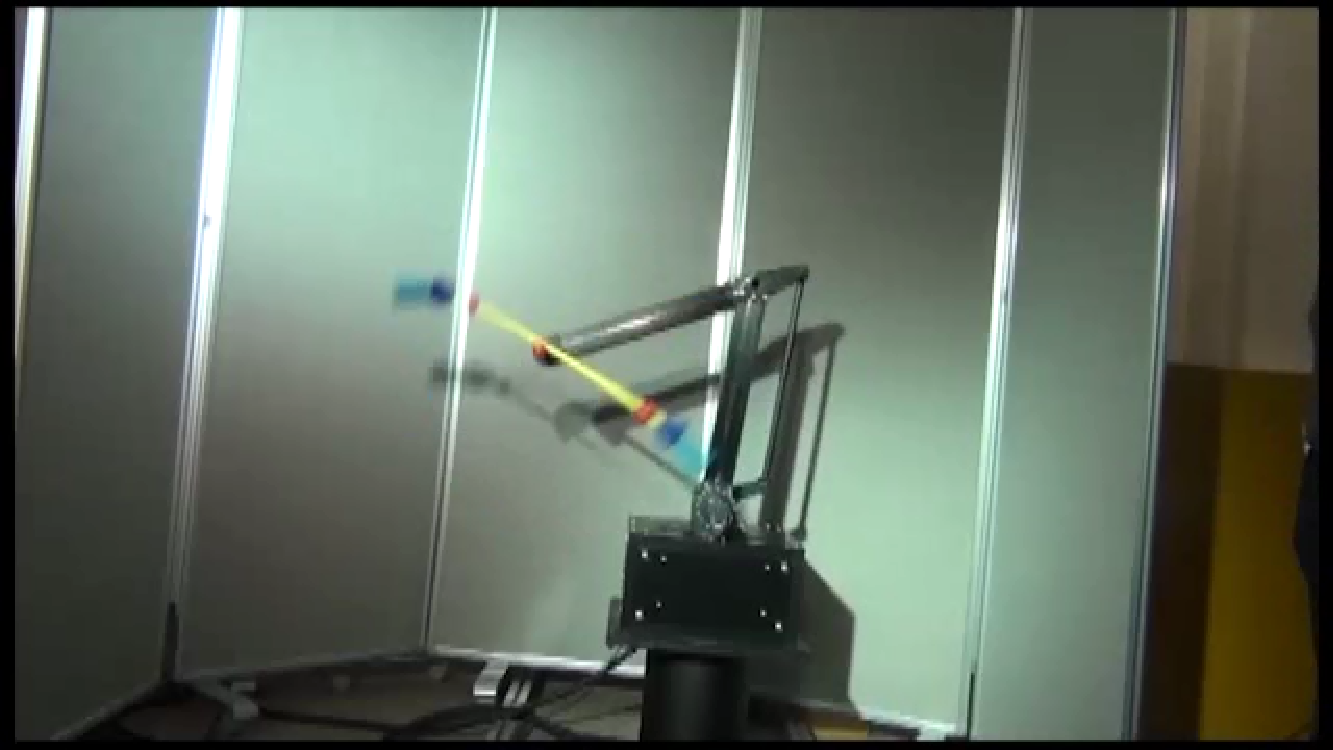
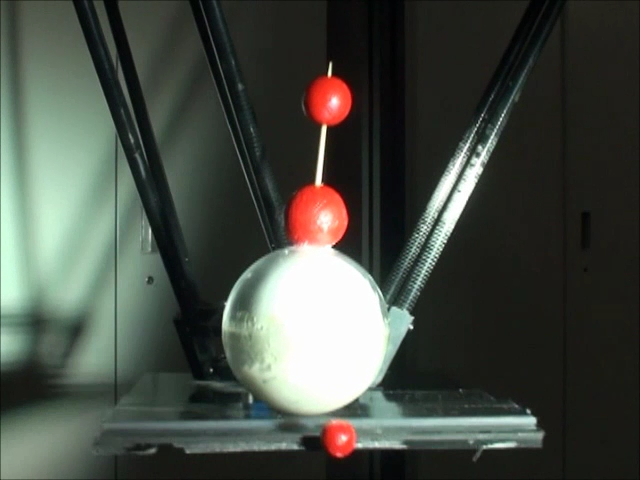
ロボットジャグリング
駆動台による非駆動対象物の動的運動制御
多自由度ロボット制御
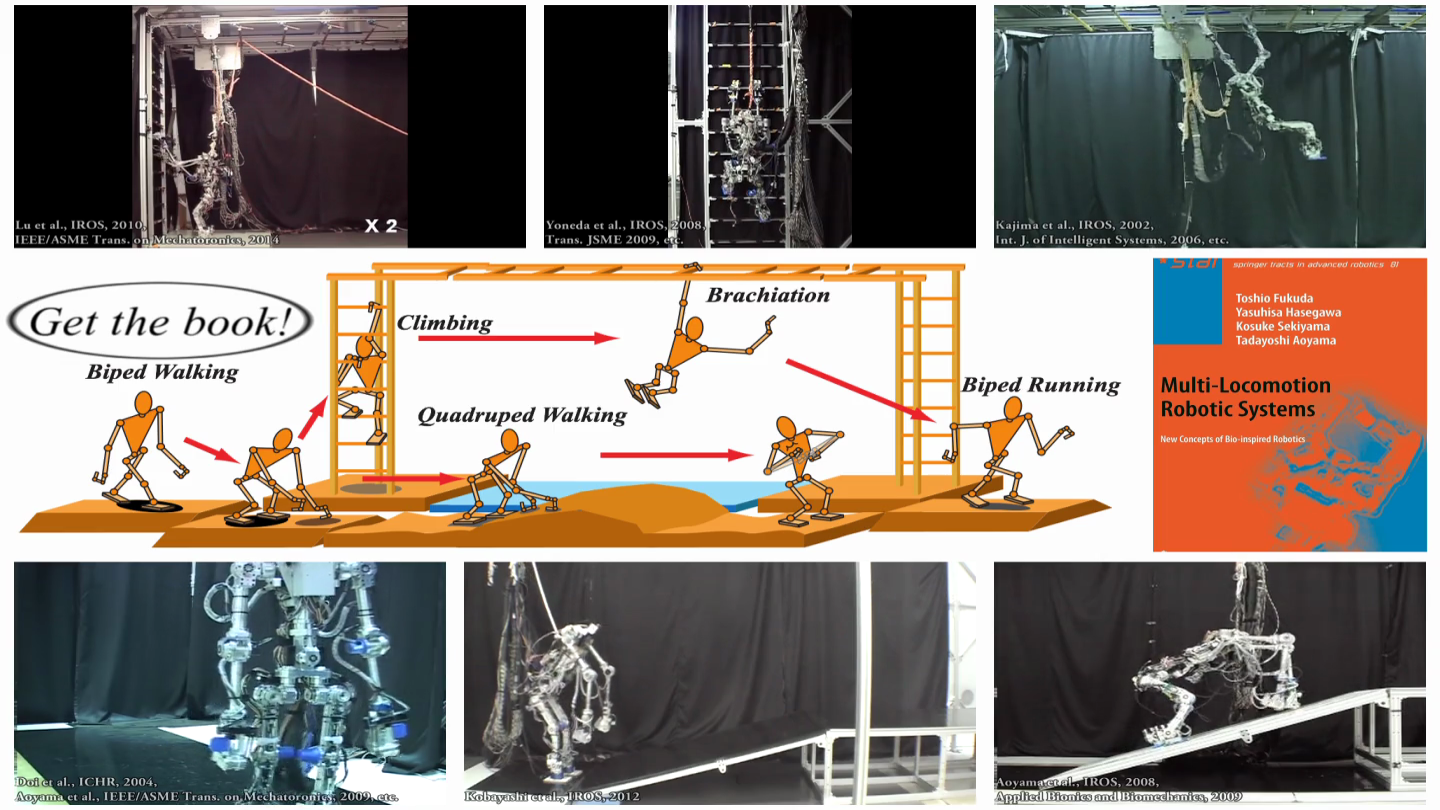
マルチロコモーションロボット