Macro-Micro Interaction
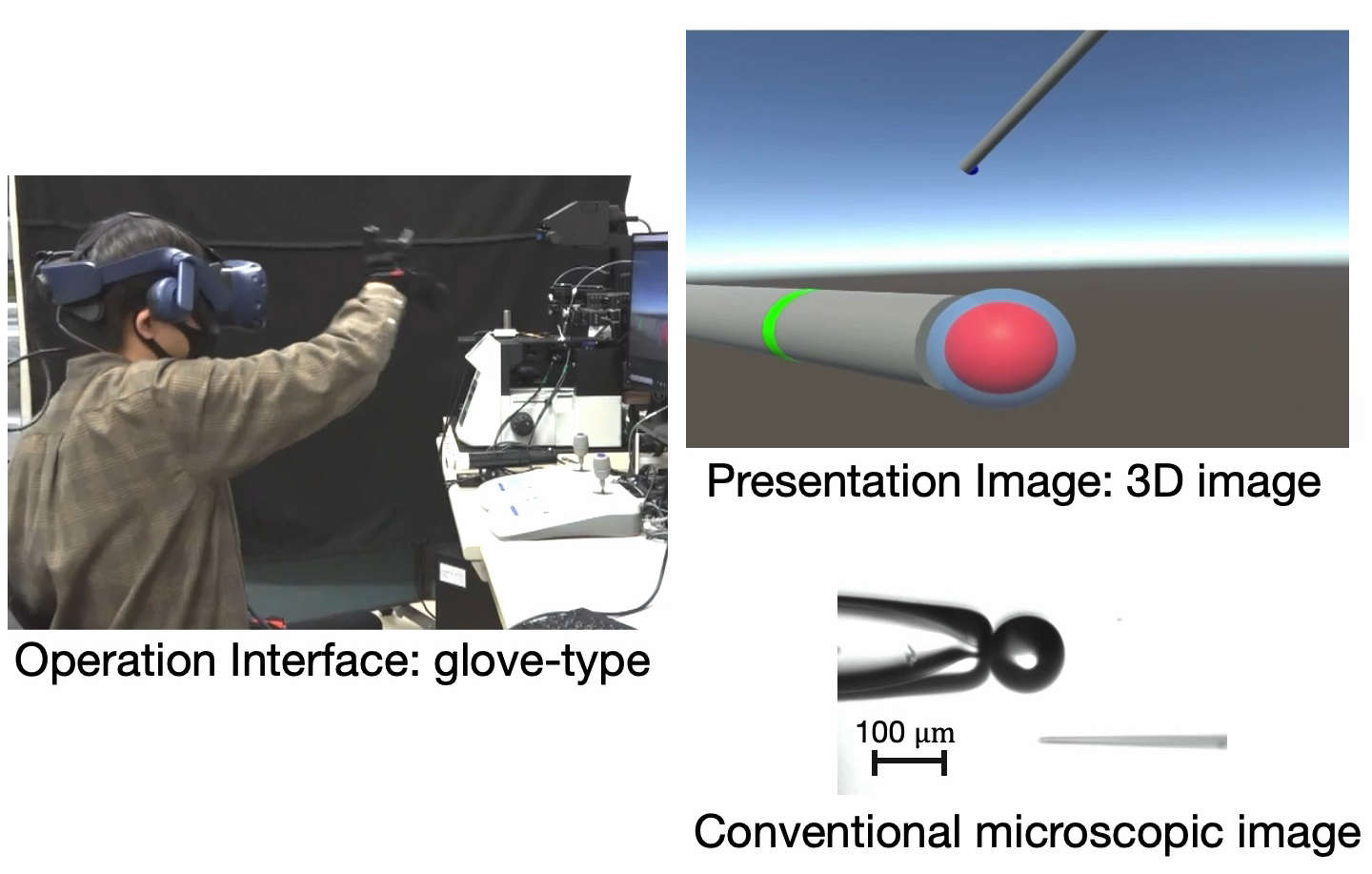
- Immersive Micromanipulation System
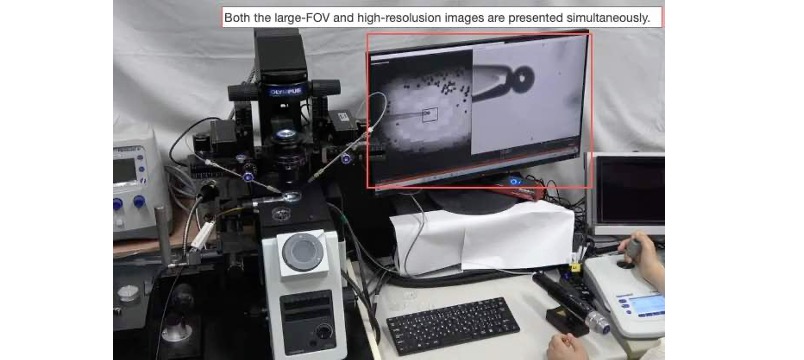
- Micromanipulation System with View-expansion Microscope
- Real-time 3D Image Presentation System for Micromanipulation
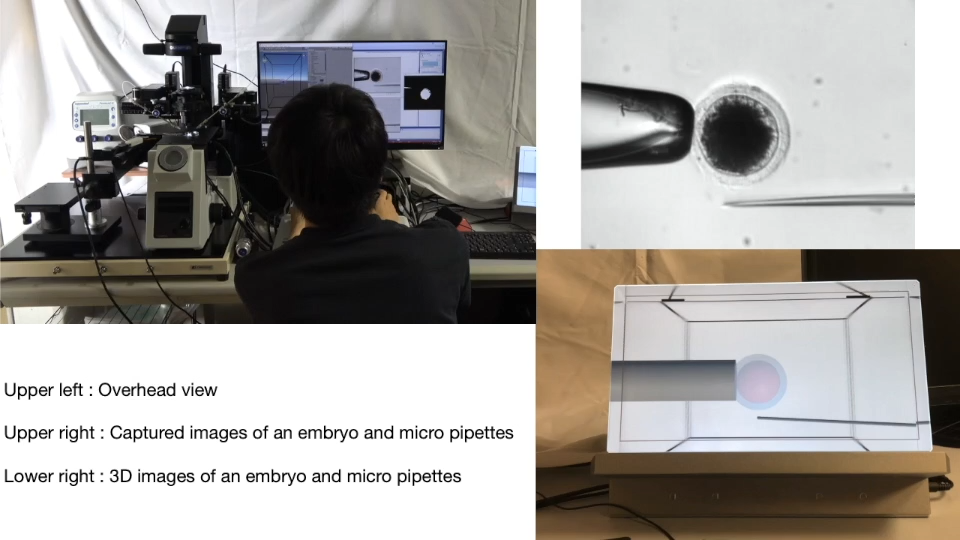
- Image Presentation Interface for micro-manipulation
Visual Sensing and Micro-Nano Mechatronics
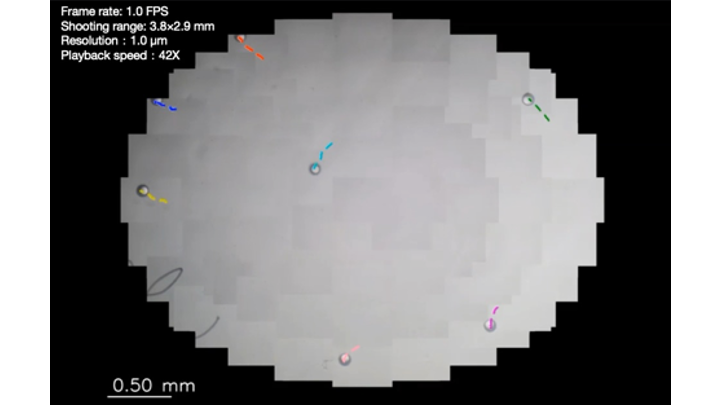
- Visual Sensing System to Investigate Self-Propelled Motion of Multiple Aqueous Droplets
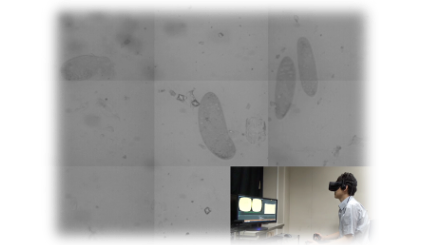
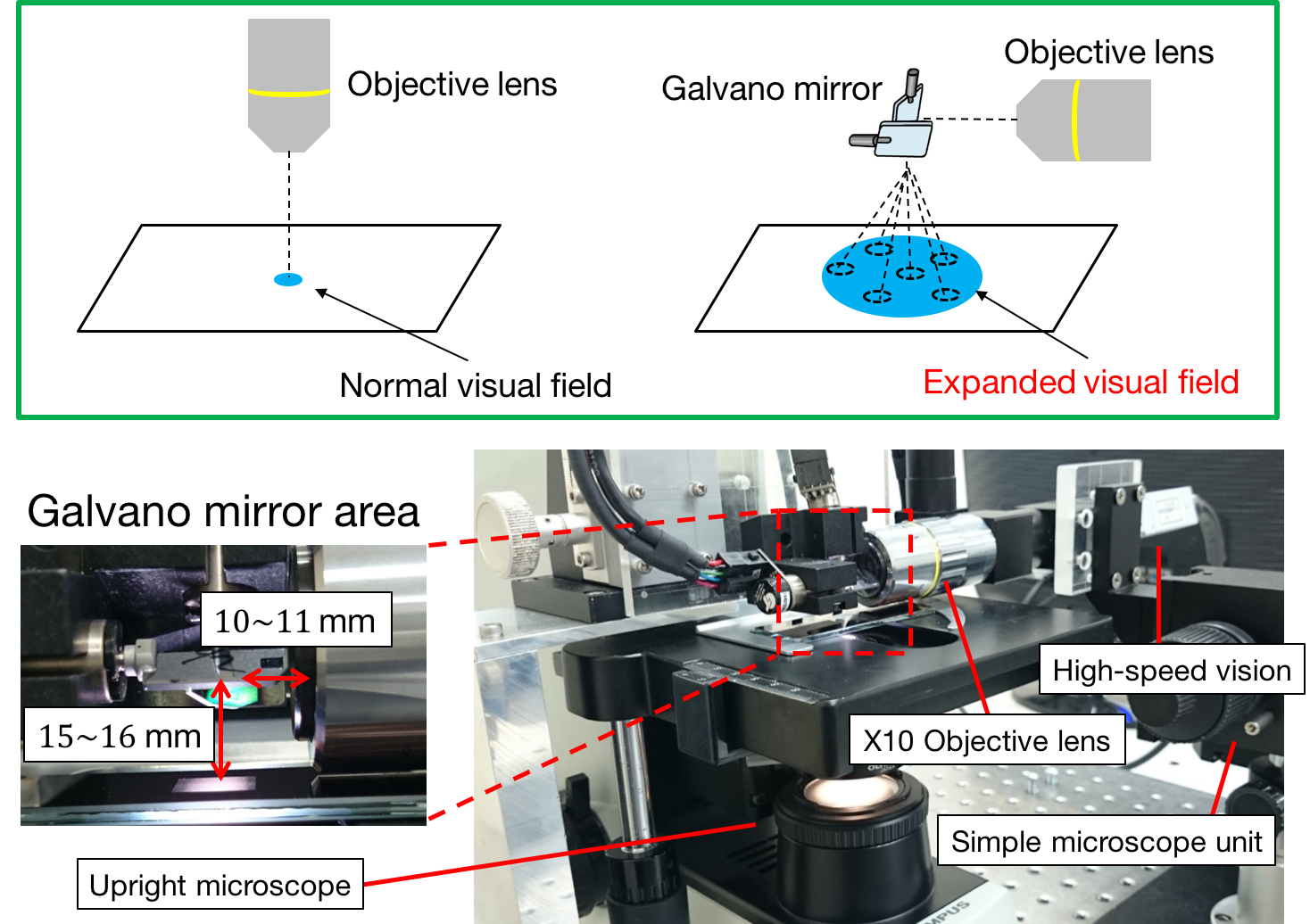
- View-expansive Tracking Microscope
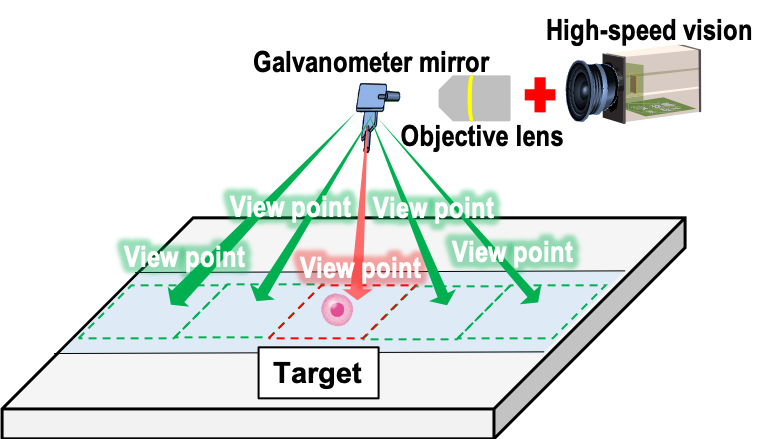
- View Expansion System for Microscope Photography
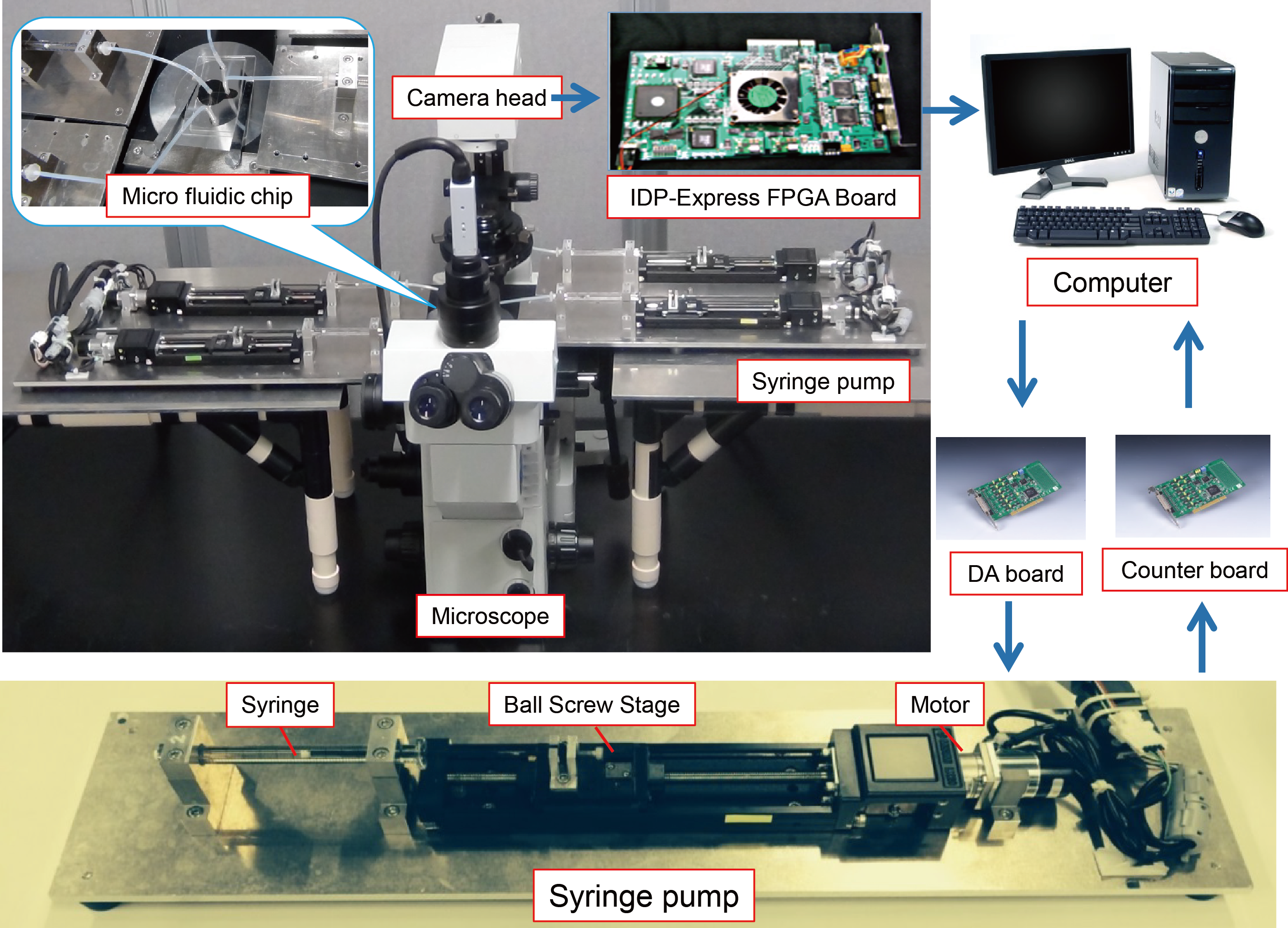
- Real-time Flow-rate Control System for Cell Analysis