駆動台による非駆動対象物の動的運動制御
本研究では,動的で安定な周期運動を生成する駆動台を用いた新たな姿勢角操作法を提案した. 制御対象の操作のための周期運動が設計され,その運動を非線形離散システムとして表現し,離散システムの平衡点がトライアルアンドエラーにより探索された. 探索された平衡点周りの安定性をリターンマップを用いて解析し,平衡点が漸近安定であることを示した.最後に,実機実験を通して,提案した対象物の操作手法を検証した.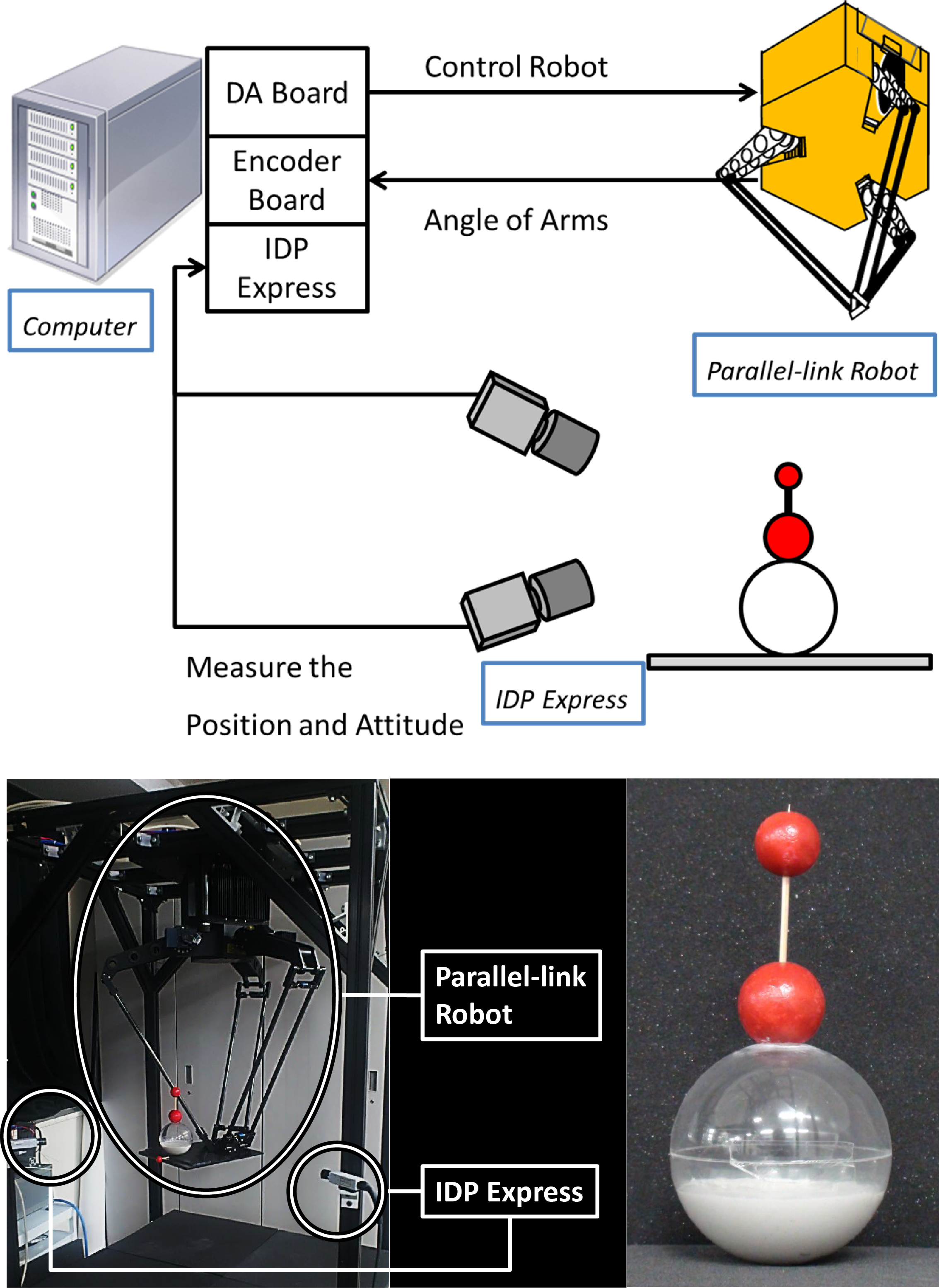 |
|
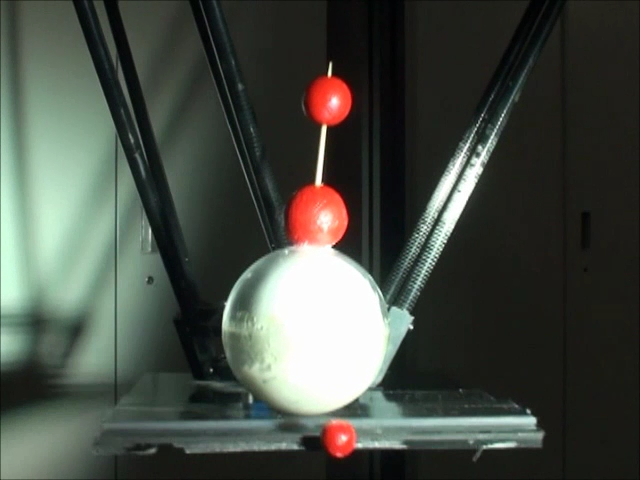
MP4 movie(2.8M)
Manipulation Experiment |
参考文献
- Tadayoshi Aoyama, Qingyi Gu, Takeshi Takaki, and Idaku Ishii: Position and Inclination Control of a Passive Disk Based on Cyclic Motion Generation, ROBOMECH Journal, Vol.4, No.1, 3 (2017)
- Tadayoshi Aoyama, Yuji Harada, Qingyi Gu, Takeshi Takaki, and Idaku Ishii: Cyclic motion design and analysis for a passive object manipulation using an active plate, Advanced Robotics, Vol.29, No.7, pp. 493-503 (2015)
- Tadayoshi Aoyama, Yuji Harada, Qingyi Gu, Takeshi Takaki, and Idaku Ishii: A Scheme for Manipulating a Passive Object Using an Active Plate, Proceedings of the 2015 IEEE International Conference on Robotics and Automation, pp.2516-2521, 2015.
- Tadayoshi Aoyama, Yuji Harada, Takeshi Takaki, and Idaku Ishii: Posture Angle Manipulation of Passive Object Using Active Plate, Proceeedings of the 2014 IEEE International Conference on Robotics and Biomimetics, pp.1451-1456, 2014.