 Japanese
Japanese自立生活支援ロボット群
超伸縮機構を用いたトイレ支援ロボット群
本研究テーマでは、高齢者や片麻痺患者のトイレ利用を支援するロボット群の研究開発を行っています。各ロボットは高い伸縮比率を発揮するロボットアームを備えており、柔軟に変形してトイレ利用における一連の動作を支援します。支援動作に合わせた独自の機構を開発することで、今まで困難であった支援も実現します。2021年よりMoonshot目標3平田グループ「活力ある社会を創る適応自在ロボット群」にて研究開発が推進されました。
立ち上がり支援ロボット L-Limb

立ち上がり時の重心移動に追従する巻き取り型Limb
下肢支援ロボット(L-limb)は、高強度と高伸縮比率を両立する巻き取り型リンク機構を左右に1本ずつ備え、利用者の起立や着座を支援します。巻き取り機構が地面の上を転がり前後に接地点が移動することと、立ち上がり時の人の重心位置の前後移動が同期し、体重支持と姿勢の安定性に貢献します。歩行支援(YouTube) 、トイレでの立ち上がり動作(YouTube)
トイレ支援ロボット L-Limb type3

下衣を上げ下げする衣服操作アーム
下肢支援ロボット(L-limb type3)は、高強度と高伸縮比率を両立する巻き取り型リンク機構を3本備え、利用者の起立や着座、歩行を支援します。また、トイレにて下衣を上げ下げするアームにより一人でトイレに行くことを支援します。トイレまでの立ち上がり・歩行支援(YouTube)
移動支援ロボット L-Limb typeF

低い着座姿勢からの立ち上がりを支援
下肢支援ロボット(L-limb typeF)は、和室での利用を想定し、座椅子程度の高さからの立ち上がりを支援します。また、立位での歩行も支援します。
移動アーム M-Limb

屈曲伸展可能なアームによる狭隘な空間作業
移動型ロボット(M-limb)は、伸縮と屈曲を同時に行えるロボットアームを有しており、衣類の着脱を支援します。独自のリンク機構により、従来の多関節ロボットアームでは難しかったトイレなど狭隘空間での作業を可能にしています。
高伸縮高強度直動アクチュエータ
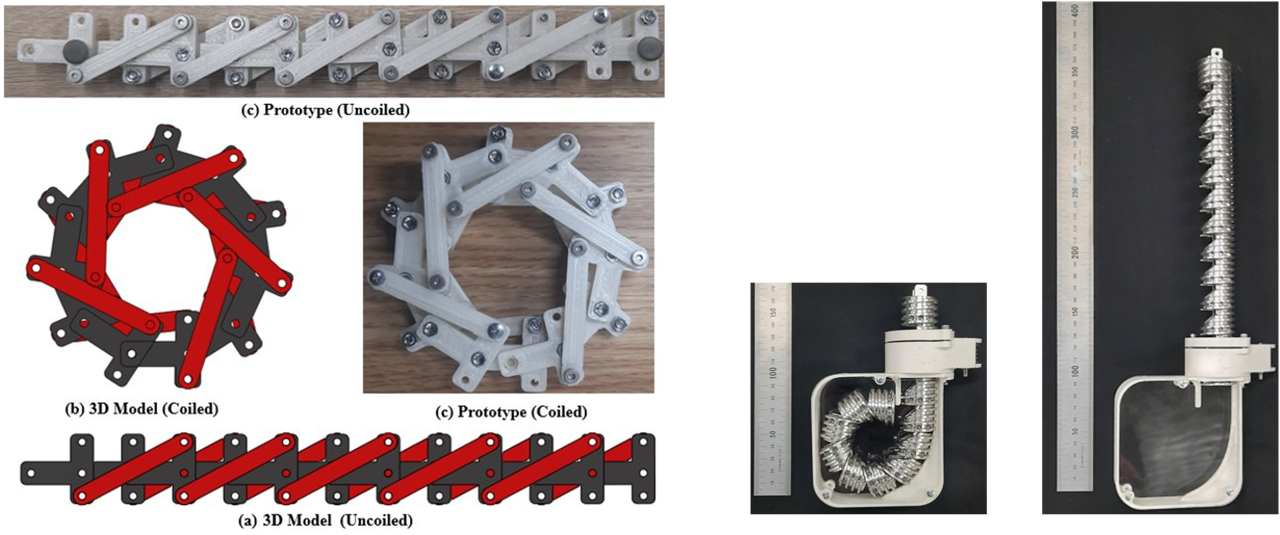
巻き取り可能な1自由度トラス構造
コイルトラス機構という高伸縮機構を用いたアクチュエータを開発しています。従来のアクチュエータでは得られなかった高強度、高伸縮比、コンパクトさを実現しています。応用性の高い機構であり、衣服を操作するアームやL-limbの脚に使用されています。
