概要
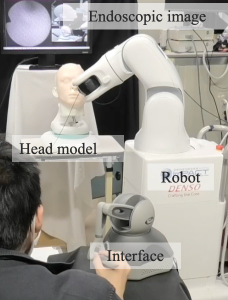
陽性判別検査時の検体採取において、医師の感染疑い者との濃厚接触を回避するために、遠隔で鼻咽頭にスワブを挿入することを可能とする遠隔スワブ操作システムの研究に取り組んでいます。
業績
- Intuitive Remote Robotic Nasal Sampling by Orientation Control with Variable RCM in Limited Space, M Takeuchi, Y Hironaka, T Aoyama, Y Hasegawa, IEEE Transactions on Medical Robotics and Bionics, 2022
- A Teleoperated Robotic System with a Movable RCM Constraint for Nasopharyngeal Specimen Collection, Yuma Hironaka, Masaru Takeuchi, Tadayoshi Aoyama, Yasuhisa Hasegawa, The IEEE International Conference on Advanced Robotics and its Social Impacts (ARSO2021), no. 51, Virtual Conference, July, 2021