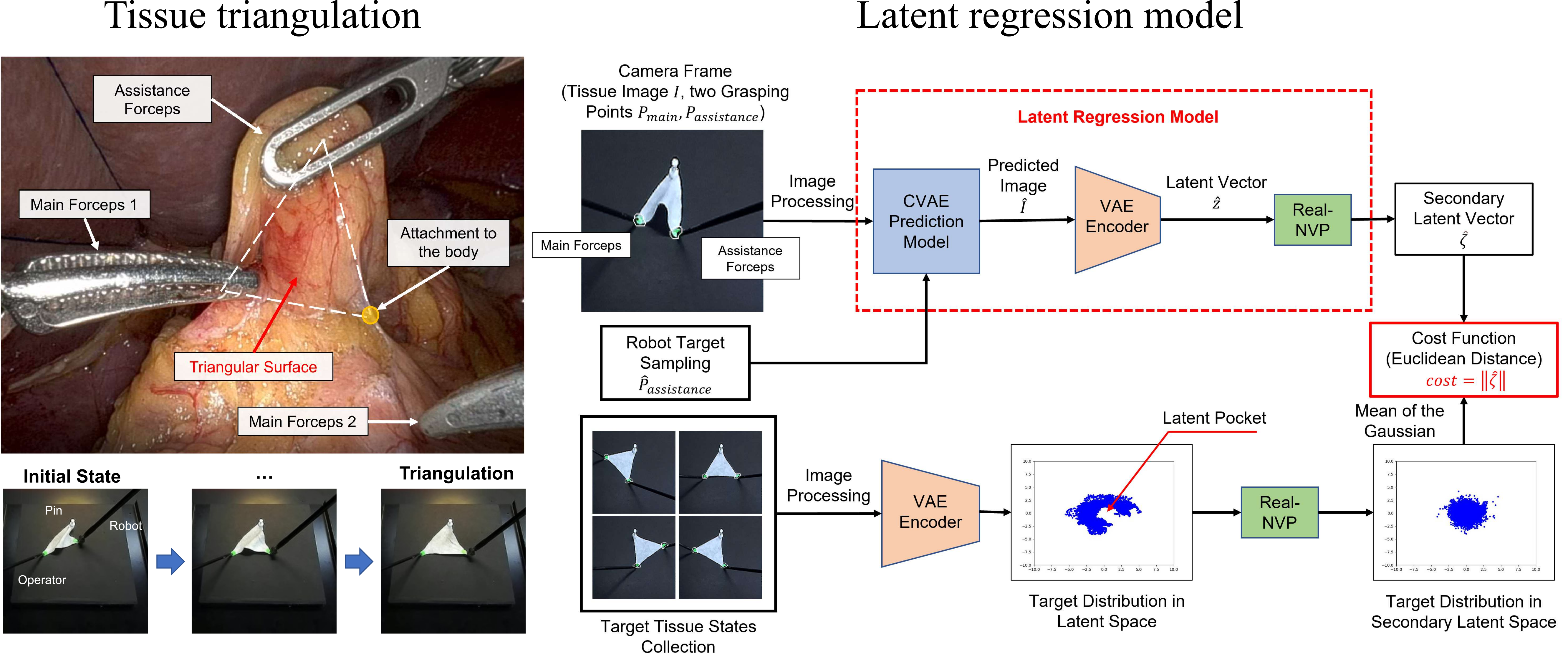
自律型組織操作システム
我々はロボット支援手術における自律的な術野展開のための潜在回帰モデルを開発して います.提案モデルは組織の変形を予測し,潜在空間内での交差エントロピーに基づく探 索によって最適なロボット動作を選択することができます.また,シミュレーション上で 強化学習を実施し,それを実世界へと移行させるReal-to-sim に関する研究も行っていま す.
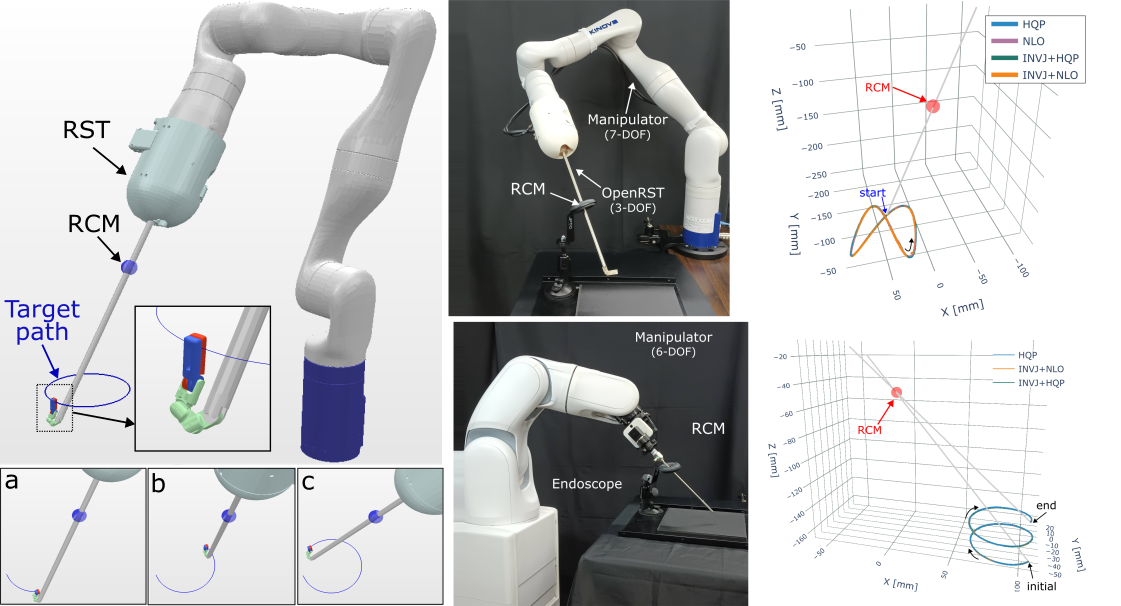
医療ロボットの制約付き動作計画
医療ロボットにおける制約付き実時間多目的並行 IK ソルバーの開発を行っています.こ のソルバは関節制約,RCM,操作性,衝突回避,およびタスク制約など,複数の制約を扱 うことができます.
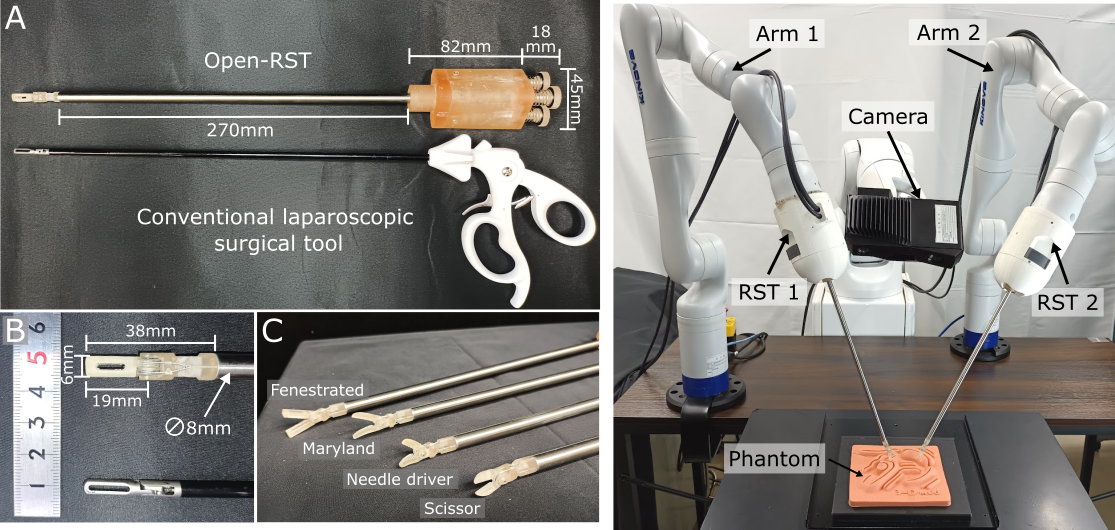
生体適合性に優れた3D プリント手術器具の開発
我々はケーブル駆動メカニズムによる最小低侵襲手術のための 3D プリント手術器具を 開発・評価しています.これらのツールは,動作と力を分離するために最適化されたデザ インと多自由度の機能を提供します.
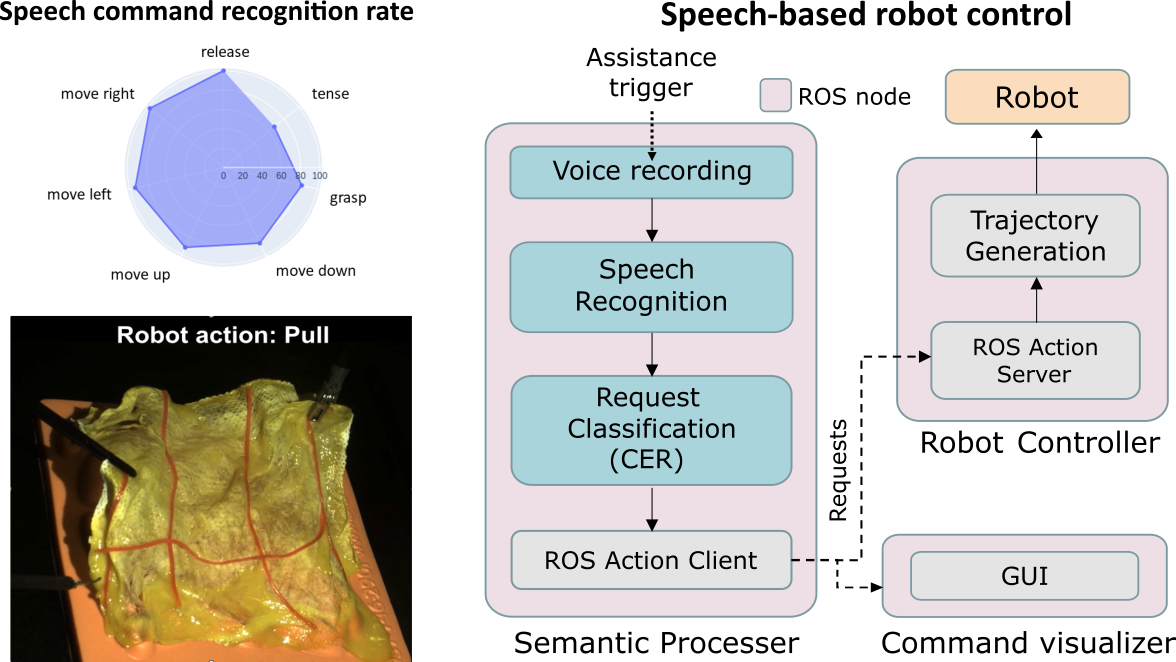
インタラクティブな協働作業のための音声ベースロボット制御
インタラクティブなロボット協働のための音声認識と動作実行システムです.このプロ ジェクトでは音声ベースのインターフェースを開発し,自然言語に通して人間がロボット アシスタントとコミュニケーションをとることを目指しています.
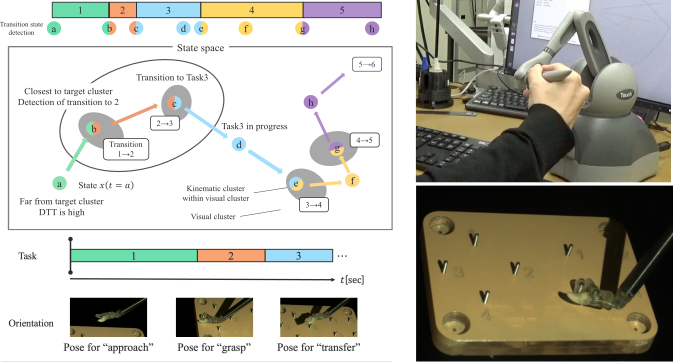
自律型ロボット支援に向けた実時間動作認識
実時間で医者の行っていることを認識し,それに合わせ事前に設定したロボット支援を 実行するシステムを開発しています.この研究では,手術シーンの視覚情報をクラスタリ ングし,その後ロボットアームの運動学データのクラスタリングを行うことで手術のアク ションを分類する階層的なフレームワークを提案しています.
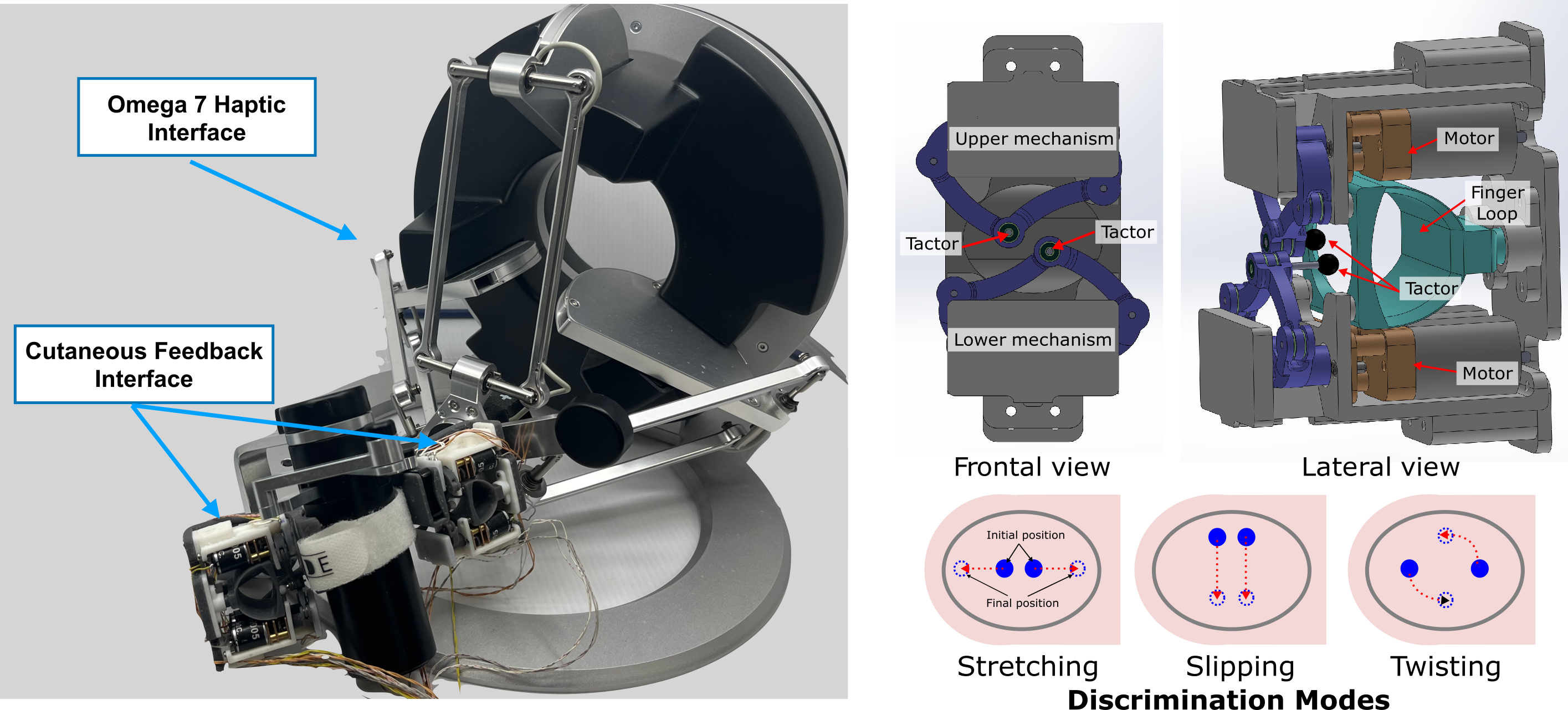
医療ロボット遠隔操作に向けた触覚デバイスの開発
我々は,医療ロボットを遠隔操作中に,接触の感覚を模倣する触覚デバイス(運動感覚/ 触覚)の開発を行っています.このプロジェクトでは操作者に没入感とリアリティのある フィードバックと制御を提供するために,VR 環境も組み込んでいます.