概要
開発した把持力支援システムは,生体電位による制御により装着者の意志に基づき動作します.指先が直接対象に触れることで,把持対象の質感や滑りやすさを感じ取ることができます.指先外骨格において支援力を対象と装着者に分配する構造にすることで装着者にかかる支援力の負荷を減らし,人を上回る把持力を発揮する際も正確に制御が可能です.
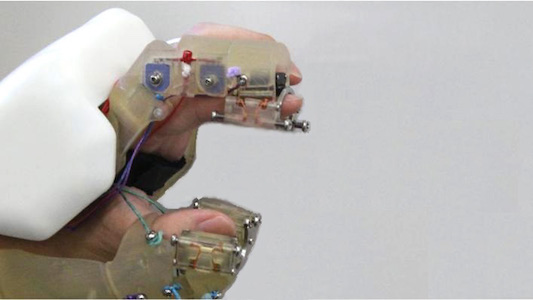
開発した把持力支援システムは成人男性と同等の把持力を発生することができます.このシステムは,人が発生する力に応じた支援力を,指の爪側から押して伝える構造であり,手の甲側に配置した3つのモータによりワイヤを介して示指外骨格を駆動します。
物体の状態を認識する際に,人の手が直接物体に触れることで得られる触感は非常に重要な情報です.開発した指先外骨格は指と外骨格の両方が対象物体に触れ,指に掛かる支援力の負荷を軽減します.
把持力支援システム使用時には正確な制御が重要となります.装置無し(N)と装置をつけた状態(E)を比較し,目標発揮力毎に比較しました.人が発揮できる最大の力を100%とした際に,目標力が50%以上では装着時が非装着時と同等以上の指先力精度を発生することを確認しました.
業績
- 長谷川 泰久,時田 淳一朗,``把持力支援における人の適応性",システムインテグレーション部門講演会,pp. 224-229,2009 Dec. 24-26,東京 芝浦工業大学
- Yasuhisa Hasegawa, Junichiro Tokita, Kiyotaka Kamibayashi, Yosiyuki Sankai, ``Evaluation of fingertip force accuracy in different support conditions of exoskeleton", IEEE International Conference on Robotics and Automation, pp. 680-685, May 9-13, 2011, Shanghai, China
- 長谷川 泰久,時田 淳一朗,上林 清孝,有山 哲理, ``外骨格把持力支援時の指先力精度の改善",自動制御連合講演会,pp. 1535-1540,2011, Sep. 1, 13-18, 東京