概要
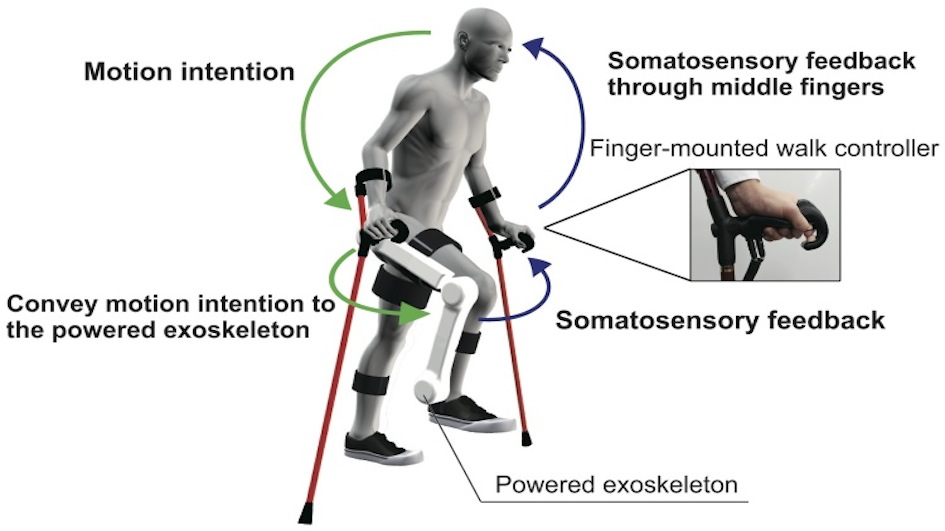
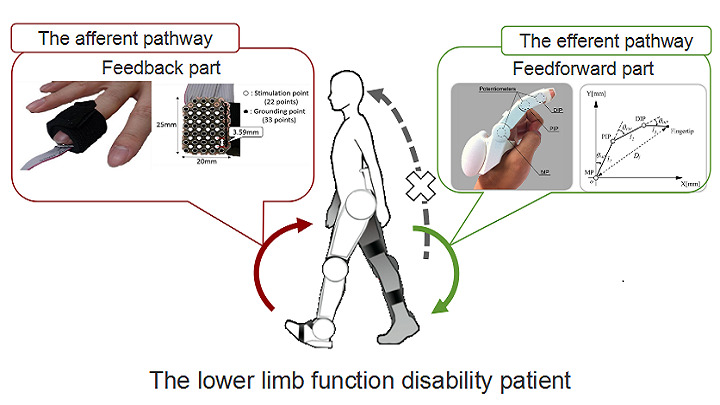
本研究テーマでは、身体拡張義肢の操作性向上を目的としています。身体運動を支援する装着型支援機器の操作性向上のためのインタフェースについて研究を進めております。例えば、歩行意思を伝える示指装着インタフェース、歩行の意思推定する杖の研究開発をおこなっております。また、支援機器の身体化も重要な視点となります。ここでの身体化とは、人工物をあたかも自分の身体の一部のように感じる自己所有感のみでなく、自分の身体運動と協調した運動計画が可能となり、また、何らかの影響により予想どおりの運動が行われていない場合には、気がつかせてくれる機能を備えることです。
業績
- Gait modification for improving walking stability of exoskeleton assisted paraplegic patient, Mengze Li, Tadayoshi Aoyama, Yasuhisa Hasegawa, ROBOMECH Journal, 7(21), 2020
- Precise Foot Positioning of Walking Robot for Paraplegic Patient Wearing Exoskeleton by Using Electrical Stimulation Feedback, Mengze Li, Zhaofan Yuan, Tadayoshi Aoyama, Yasuhisa Hasegawa, ASME Journal of Mechanisms and Robotics, 10(4), 2018
- Electric stimulation and cooperative control for paraplegic patient wearing an exoskeleton, Mengze Li, Zhaofan Yuan, Xufeng Wang, Yasuhisa Hasegawa, Robotics and Autonomous Systems 98, pp.204-212, 2017
- Electric Stimulation Feedback for Gait Control of Walking Robot, Yasuhisa Hasegawa, Keisuke Nakayama, Kohei Ozawa and Mengze Li, International Conference on Intelligent Robots and Systems (IROS), 2015