
Hybrid Interfaces
Hybrid Interfaces for adaptive control of multi-DOF surgical tools
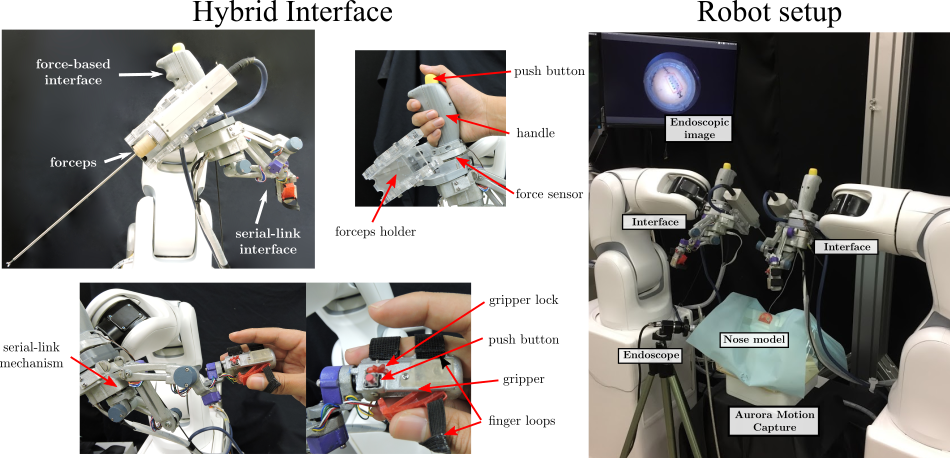
We investigated the use of hybrid force and articulated interfaces for adaptive control of multi-DOF surgical robots. The project combines a force-based interface for the coarse motion of the robot and an articulated interface for the fine motion. The force-based interface integrates a 6DOF force/torque sensor as input for an admittance robot control. The articulated interface consists of a 6-DOF serial-link interface and a gripper. The hybrid interface is designed to be used in a constrained environment, such as endonasal surgery.
Passive Mechanisms
Passive mechanism-based interfaces for constrained surgical manipulation
This project developed human-robot interfaces for controlling multi-DOF surgical tools that are attached to passive mechanisms for constrained surgical manipulation. The project leverages the advantages of passive mechanisms, such as simplicity, safety, and compliance, to enable precise and intuitive control of the surgical tools in various surgical scenarios.
Robot-assisted Stitching
Robot-assisted stitching for cooperative endonasal surgery
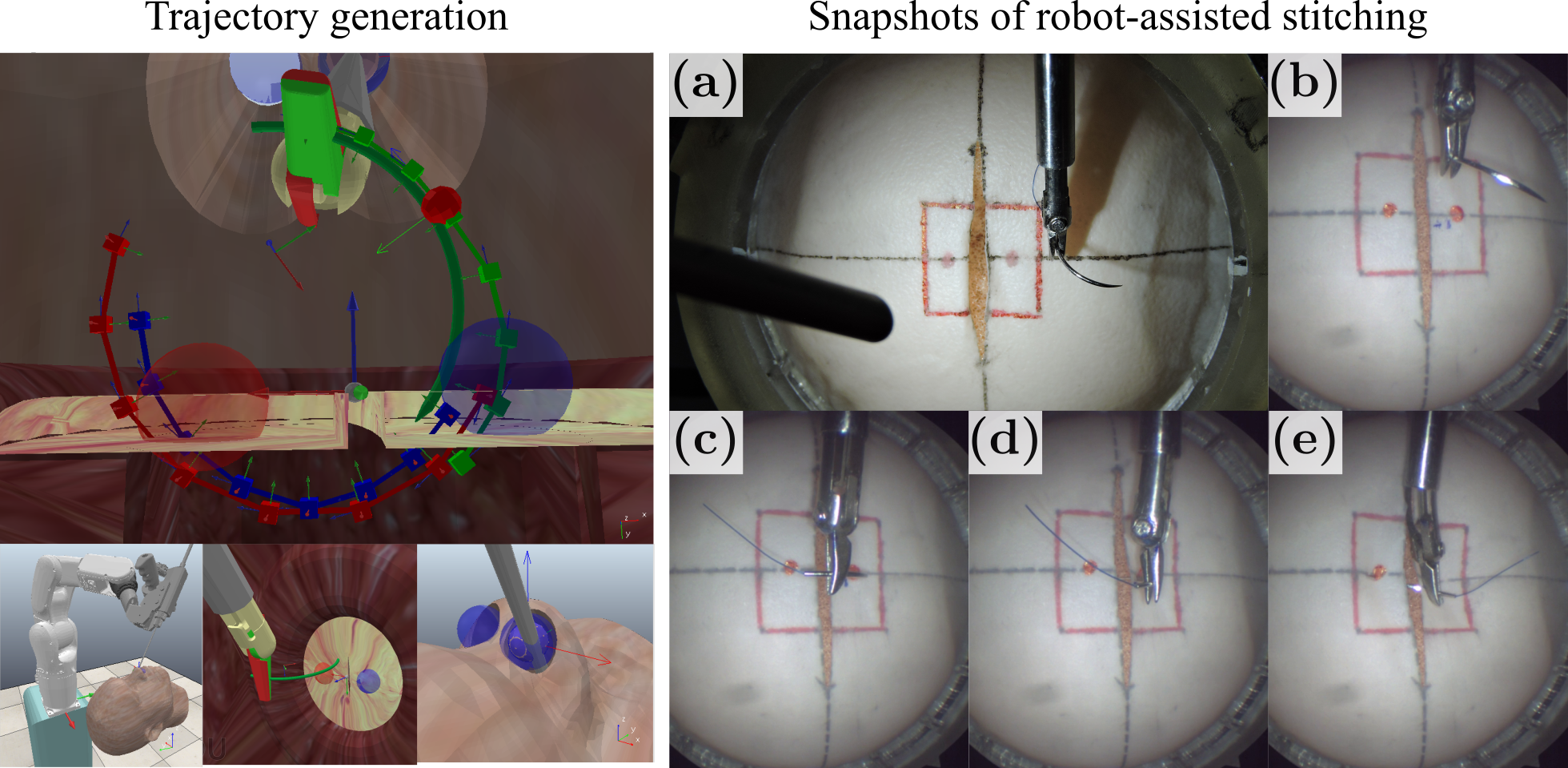
This project proposed online trajectory generation methods for robot-assisted stitching in endonasal surgery. It uses sequential convex optimization techniques to generate trajectories that satisfy requirements such as depth insertion, needle curvature, and entry/exit points.
