About
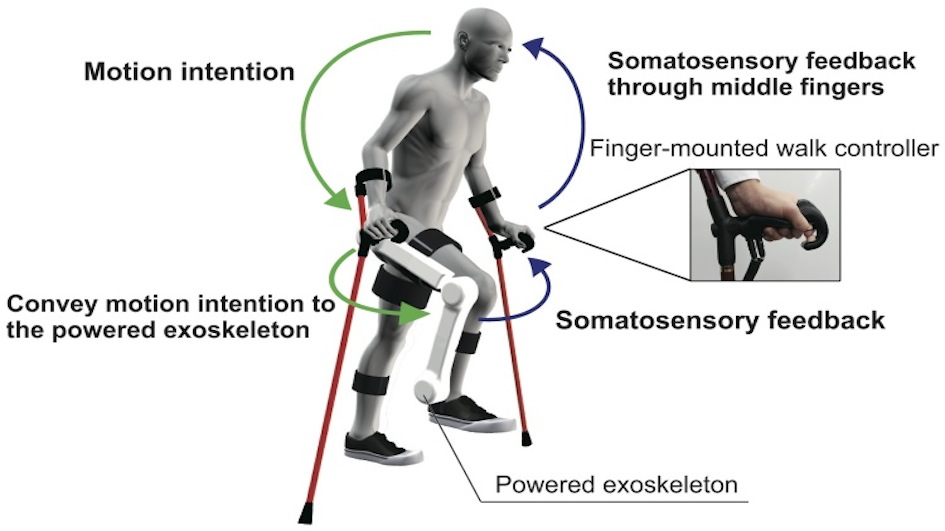
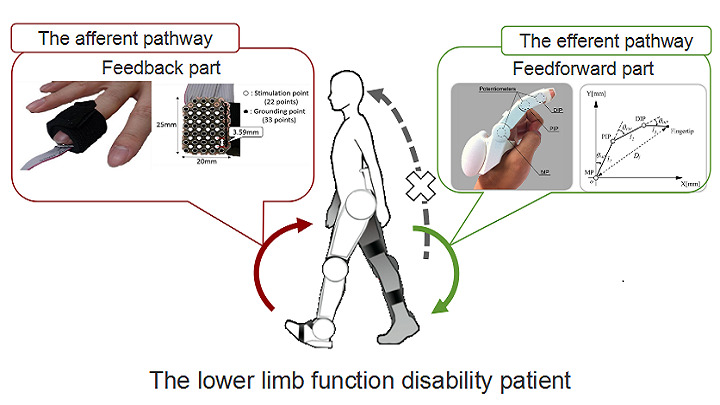
This research aims to develop a walking control interface for paraplegic patients wearing exoskeletons. The interface enables the patients to intentionally control their stride instead of following pre-designed motions of the lower limb exoskeleton during walking. In addition, a humanoid robot was developed to implement walking experiment for evaluating the contribution of the interface.
Publications
- Precise Foot Positioning of Walking Robot for Paraplegic Patient Wearing Exoskeleton by Using Electrical Stimulation Feedback, Mengze Li, Zhaofan Yuan, Tadayoshi Aoyama, Yasuhisa Hasegawa, ASME Journal of Mechanisms and Robotics, 10(4), 2018
- Electric stimulation and cooperative control for paraplegic patient wearing an exoskeleton, Mengze Li, Zhaofan Yuan, Xufeng Wang, Yasuhisa Hasegawa, Robotics and Autonomous Systems 98, pp.204-212, 2017
- Electric Stimulation Feedback for Gait Control of Walking Robot, Yasuhisa Hasegawa, Keisuke Nakayama, Kohei Ozawa and Mengze Li, International Conference on Intelligent Robots and Systems (IROS), 2015